-
Detecting Cleanflight PID tuning issues with Blackbox: excess D gain
Welcome to second part of Blackbox PID tuning tutorial. Last time I have showed few examples how excess P gain might look like. Today I will write few words about next common PID tuning problem: too much D. Derivative (future) part of PID controller is very useful, since it allows to smoothen control loop output when it is reaching the target. So, at the end of move (roll, pitch, yaw, anything else) multicopter will start to "slow down" before target is reached. It's just like accelerator pedal in a car. When you want to reach 50 you start to release it before you reach 50, and not in the exact moment you reached target speed. If you would, you would have to use brake to slow down to 50. Derivative part helps not to overshoot. Without it, movement would be shaky, not smooth.
Unfortunately, D is tricky. Like everything that tries to see the future, it is unreliable and can introduce noise. We do not like noise. Not enough D = shaky, mechanical, movement and overshooting. Too much D = extra noise, vibrations, damped response.
How excess D would look like in Blackbox logs? Like this:
-
Quick Peek: Eachine Light-2D Brushless Gimbal
You can buy almost everything from China. Including 2 axis gimbal for less than 50 Euro. Websites like BangGood and Aliexpress sell them worldwide. The only question is: are they any good? I've decided to check that out and I have purchased Eachine Light-2D Brushless Gimbal w/Motor&Controller For DJI Phantom. Of course, it is not only for Phantom. If you can mount it on your multicopter, you can use it. Why not, it is a clone of BaseCam SimpleBGC 8-bit. The most general purpose gimbal controller there is!
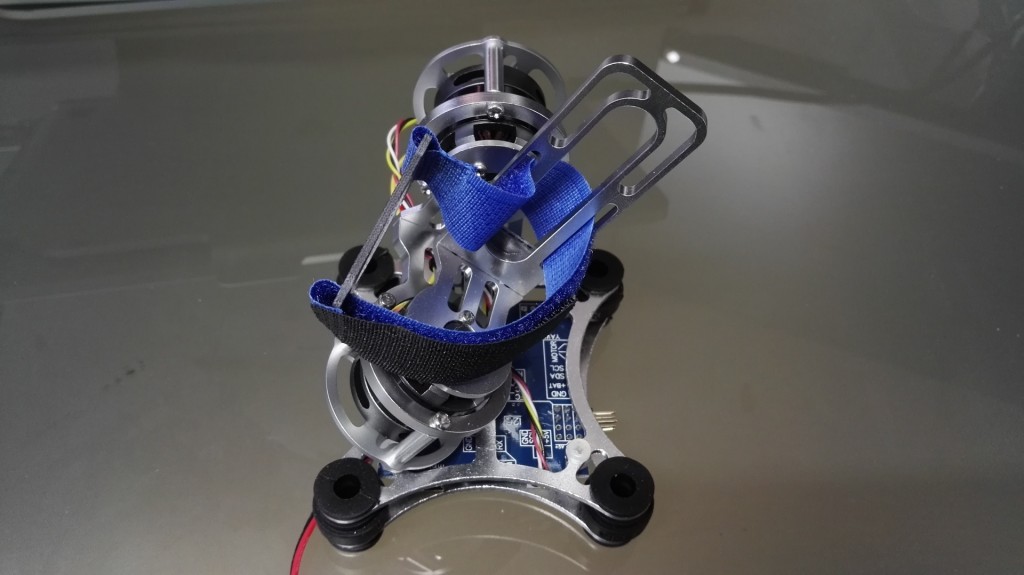
So, is it any good? Read more...
-
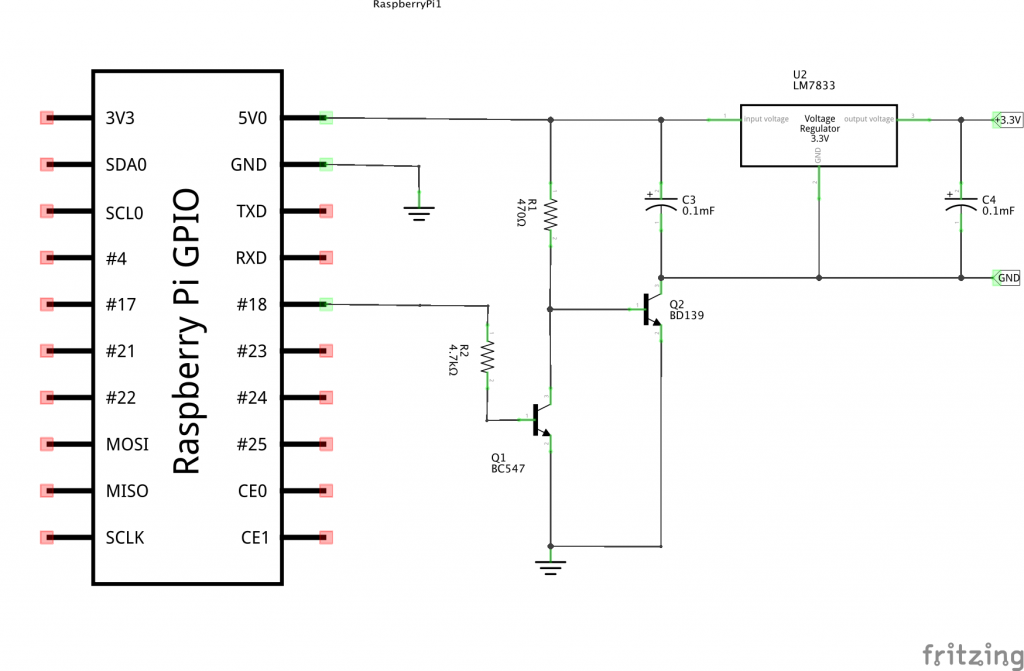
Using transistors as switches
I think all popular computerized DIY devices like Arduino, Raspberry Pi or any other microprocessor/microcontroller based boards has one common drawback: low output current. Few miliamps per pin. While this is enough to light a single LED or provide input to other electronics device, it is far from enough to run a motor or power a LED strip. It's all about current.
Good thing this problem can be solved with two additional devices: resistor and bipolar transistor. Together they can act as a switch. Idea is simple: low current (and voltage if you wish) applied to transistor base causes bigger current (and voltage) to be passed between collector and emmiter. We have two choices: NPN or PNP bipolar transistor. Switch that uses NPN transistor is open/enabled when positive voltage is applied to base. In other words, base is connected to plus.
-
Problem: no OSD when camera is connected on minimOSD MW OSD
Problem
When camera and minimOSD are connected to video transmitter, minimOSD is not overlaying OSD data. If camera is disconnected, OSD data is transmitted. After connecting camera, only camera image is transmitted.
Possible Solution
Check if camera and minimOSD are using the same display system. Usually monitor/goggles and video transmitter does not care very much about used display system. Transmitter just transmits, and monitor/goggles very often can detect if signal is PAL or NTSC. But if camera is sending PAL signal, minimOSD has be overlaying imag using PAL subroutine. If it will try to use NTSC mode, it will fail. In case on MW OSD software (Scarab OSD), OSD display system is configured in GUI. Set it to the same system as camera.
Read more...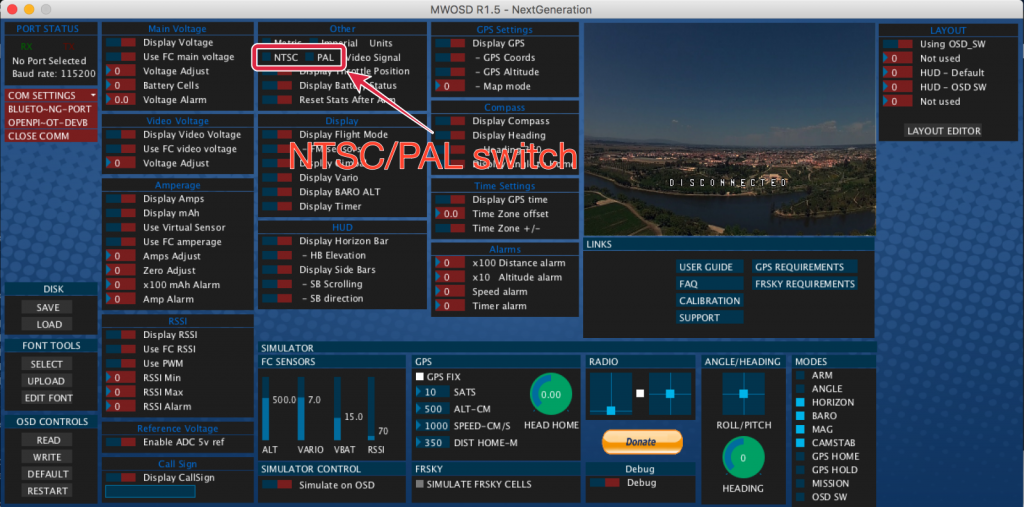
-
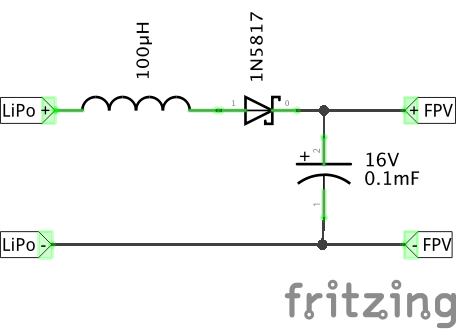
DIY FPV LC power noise filter
Both electrical motor and ESC are source of electrical noise that influences all devices connected to the same battery. This is why, very often, on airplanes or big multirotors FPV circuit is powered from separate battery. On small or medium drones this can be hard to archive: additional weight will influence both flight performance and flight time. So, when your setup is suffering from a power noise manifesting itself as vertical bars or other image distortions on goggles/monitor, you can do 3 things:
- use separate battery to power camera and video TX,
- cut the noise using LC low-pass power filter.
I would choose low-pass filter. Cheaper and lighter. You can buy one for a few dollars/euros or make 10 by yourself for the same price.
-
Quick review: Turnigy 2730 1500KV brushless motor
I've bought first Turnigy 2730 1500KV brushless motor by accident. I needed something small and cheap for Depron airboat. Then I needed something similar for a Depron airplane. At the end, in 6 months, I owned 3 T2730 1500KV motors. Not all of them survived the experience. One got lost in the middle of a lake with the rest of airboat it powered. Second got burned what I forced it to power too big propeller. Third one still lives and this type is my first choice for anything up too 400g of weight.
-
Raspberry Pi: reset external I2C devices (not only I2C)
Electronic, and specially computerized, devices likes to hang from time to time. There are many reasons: software bug, hardware error, voltage drop, interference, too long wire, random incident. I've learned this hard way during work on my Raspberry Pi based weather station. From time to time external DTH22 temperature/humidity sensor refused to work. Only solution was to cut power to DHT22 for a second (or less). It was kind of irritating to go the attic, unplug sensor and plug in again. Later on I had similar issues with HD44780 LCD display over I2C bus. Device was hanging and only solution was to cut power. So, I've found a solution: as a prevention cut power for a second every 30 minutes with a simple electronic device I've called "Power Cutter".
-
Detecting Cleanflight PID tuning issues with Blackbox: excess P gain
Almost all quadcopter PID tuning tutorials can be summarized into one sentence: "Increase P until you see oscillations, then lower it". Plus some thoughts about I and very vague advices about D and that is all. When I got into the hobby, I've read all of those tutorials. And I did know more about PID tuning than before that. I even had more questions than before. How to recognize high frequency oscillations, how to recognize low frequency oscillations. Lower P? OK, but how much? And D? How to tune this bloody D? As a result, every time I tried, I ended up with very snappy but shaky quadcopter that maybe responded very quickly to commands, but was very shaky and was making strange noises.
And then came Cleanflight and Blackbox. Live became simpler. What I've learned from Blackbox logs is that I wanted high P so much, I had too much of it in the end. Actual oscillations begins before we see or hear them and excess D introduces jello. Blackbox simplified things, but still, logs analysis is something like an art. You have to know what to look for. Read more...
-
Best drone for Christmas
Christmas is upon us. Less than 2 weeks to be precise. Since drones are such a hot topic, many will want to get one for Christmas, many will want to buy one as a gift. There are so many of them at the market, it's not a problem to buy one. It's a problem to choose correct one, so that everybody is happy. Sure, everybody would like to get DJI Inspire 1 for Christmas, but I do not think that's a point here. So, here are my recommendations for todays question: "What is the best drone for Christmas?"
First drone for indoor flying
They are small, they are cheap, they are almost indestructible and rooms are their natural habitat. Nano drones. Excellent idea for a Christmas present. Cool enought to give joy and cheap enough that it will not be huge loss if they will be thrown into a corner or destroyed after few days. Additionally, low weight, low speed and small propellers greatly reduces chance of destroying something or causing injury. In this category I want to recommend Hubsan X4 H107.

-
Quick review: Eachine PCB Power Distribution Board for ZMR250/QAV250
Building a quadcopter without nice power distribution board always leads to the same result: state of total cable entanglement. It looks ugly, makes maintenance hard and adds unneeded weight. I will not show how my ZMR250 quad looked after I added FPV and OSD into it. Almost all space between top and bottom plate was taken by cables. Nightmare. So, after spending less than $9 I've become an owner of Eachine PCB Power Distribution Board w/ OSD Socket Support NAZE32 CC3D OSD For QAV250 Quadcopter from Banggood. This board did not have very good reviews, but offered three things I wanted: sockets for micro MinimOSD, integrated signal lines and low price. So, I gave it a try.










I'm Paweł Spychalski and I do things. Mainly software development, FPV drones and amateur cinematography. Here are my YouTube channels: